碰撞檢測的優化-四叉樹(Quadtree)
許多遊戲都會需要碰撞檢測來判斷兩物體的碰撞,但這些演算法通常是較為昂貴的操作,如果無法有效率的選擇檢測目標,很可能會大幅降低執行的速度。(像是之前提到的SAT碰撞檢測)
在之前的”多邊形碰撞檢測”文中,也有提到當檢測物體越來越多時,基本逐一檢測的效率會越來越差,複雜度約為O(n^2),就算排除重複檢測過的物體,只要是逐一檢測的方法就一定會走訪所有物件。
從上圖可以得知直接全部檢測的話是4 x 5 = 20,如果扣掉重複,至少是4 + 3 + 2 + 1 = 10,但真正的問題是,就算1和3距離這麼遠,也照樣會檢查它們,那有沒有方法能解決這種狀況呢?
這就是文章的主要內容,QuadTree。
1. 什麼是QuadTree?
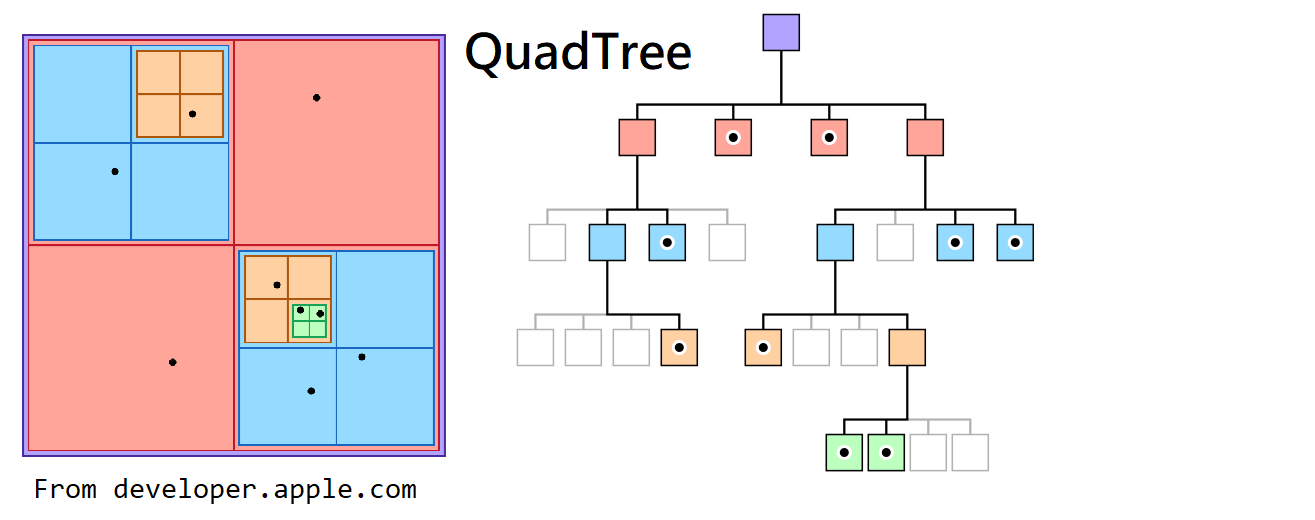
四叉樹(QuadTree)是一種劃分2D區域的樹狀資料結構,類似一般的二元樹,但子節點是4個,而不是2個。
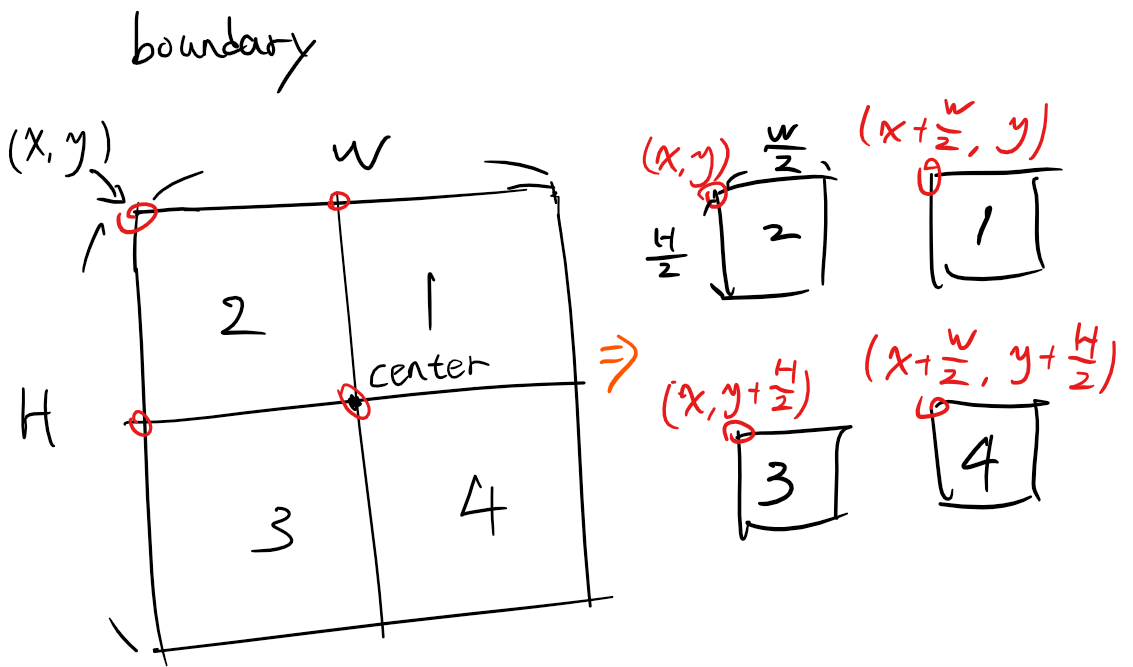
區域的劃分架構類似這樣 :
並限制每個區域能容納的上限,當超過後就將該區域再往下分割4塊,這樣就能夠將每個物體進行區域分類,這樣在檢查的時候就可以鎖定部分區域的物體,從而增加效率。
2. 插入流程:
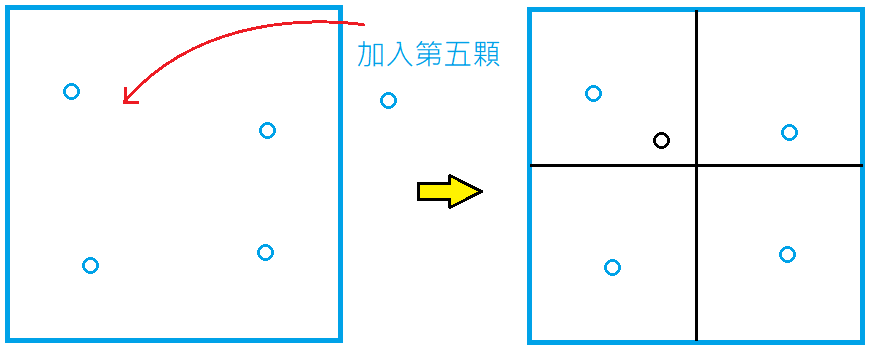
假設我先設定每個區域只能容納4個物體,只要超過該容量,就要分割該區域。
左圖方形區域已經有4個物體,想再加入第5個時,就必須分割成4個子區域,再將第5顆分類到最近的左上角區域中,如右圖:
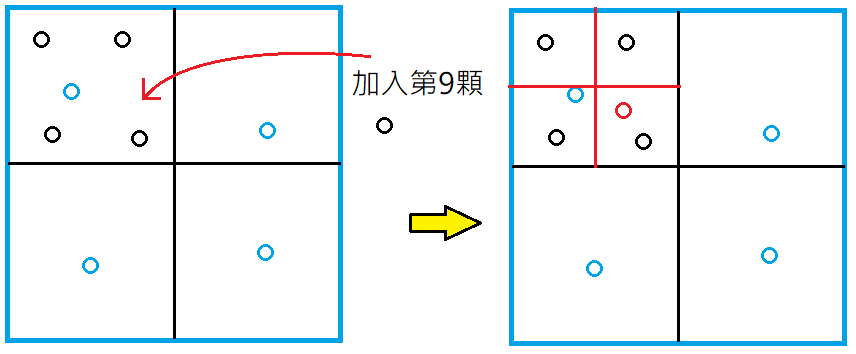
以此類推,當要放入第9顆物體時,發現黑色區域也滿了,所以就再往下分割紅色區域,並放入離該物體最近的右下角區域中,如下圖:
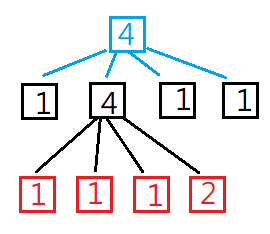
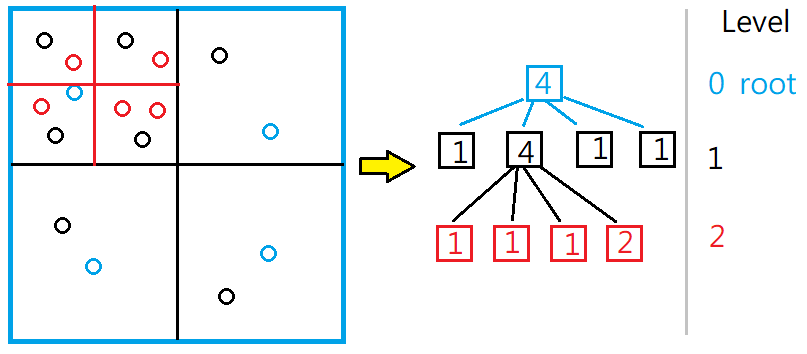
最後,就可以得出這樣的樹狀結構,這就是為什麼會叫做4叉樹的原因,如下圖:
3. 搜尋流程:
給定一搜尋範圍,並逐一排除不可能的區域,最後取得搜尋範圍內的物體。
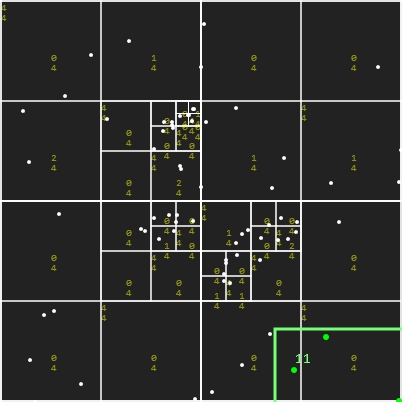
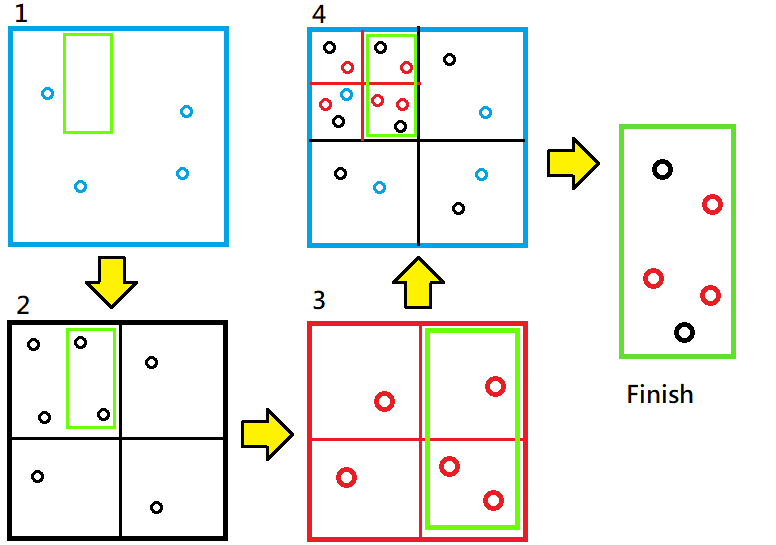
接續前面插入的狀態,假設我要檢測綠色框框內的物體是否發生碰撞,步驟如下 :
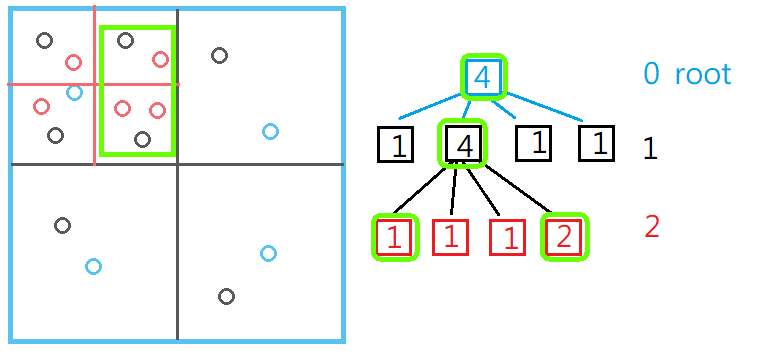
- 與藍框區域作碰撞檢測,發現有所交集,檢測藍色區域的物體是否包含在綠框中,發現並沒有。
- 與藍框的黑色子區域作檢測,發現只與左上的區域有所交集,所以排除另外三個區域,並發現有2個物體包含在綠框內。
- 再往下檢察左上黑框的紅色子區域,並排除左上、左下,發現有3個物體在綠框內,紅框沒有子領域,走訪結束。
最後回傳搜尋到的5個物體。
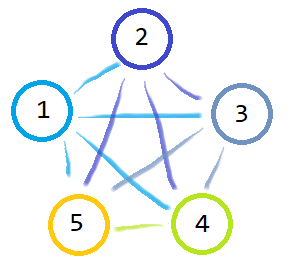
如果是碰撞檢測的應用的話,就是把綠框換成該物體周圍可能發生碰撞的範圍,再來套入搜尋,就能更加簡化碰撞檢測的流程,如下圖 :
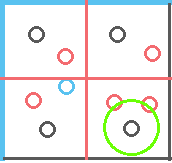
假設要檢查綠色圈圈與那些物體發生碰撞,透過前述的篩選流程,搜尋到最後,只要針對和綠圈區域相交的3個物體檢測就好,以此達成碰撞效率優化。
這就是四叉樹的原理,接著進入實作環節吧。
4. 實作QuadTree–插入
先整理大致的插入順序:
- 如果該點不屬於A區域,直接結束
- 如果該點屬於A區域,且A區域容量還夠的時候,將該點加入A區域
- 如果A區域容量不夠時,將A區域劃分4個子區域,並將該點加入離它最近的子區域
建立基本物件 :
class Point {
constructor(x, y) {
this.collisionType = "point";
this.x = x;
this.y = y;
}
}
class Rect {
constructor(x, y, w, h) {
this.collisionType = "rect";
this.x = x;
this.y = y;
this.w = w;
this.h = h;
}
}
四個子區域的規劃:
並依照前述所說的插入順序,來建立QuadTree :
class QuadTree {
constructor(boundary, level) {
this.MAX_OBJ = 4;// 該容器最大容量
this.MAX_LEVEL = 5;// 最大深度
this.objs = [];// 該容器的物體集合
this.areas = [];// 四塊子區域
this.level = level || 1;//當前深度
this.boundary = boundary;// 容器範圍(Rect)
}
/*
如果該點在範圍內,且容量也夠的話就新增該點至區域內,或是到達最大深度也直接新增
到達容量上限後,就分割出四個子領域,再將物體分類至最靠近的子領域中
*/
insert(object) {
// 先確認物體是否在邊界內
if (!CheckCollision(this.boundary, object)) return false;
// 如果當前容量與深度未達上限,就直接新增該物體
if (this.objs.length < this.MAX_OBJ || this.level >= this.MAX_LEVEL) {
this.objs.push(object);
return true;
}
// 如果容量達上限,且沒有子領域的話,分割出四個子領域
if (this.areas.length <= 0) this.subdivide();
// 嘗試給子領域新增該物體
for (let area of this.areas) {
if (area.insert(object)) return true;
}
}
subdivide() {
let x = this.boundary.x, y = this.boundary.y;
let w = this.boundary.w, h = this.boundary.h;
// 矩形以左上為基準,依照各象限順序建立子領域,並新增到areas中
this.areas.push(new QuadTree(new Rect(x + w / 2, y, w / 2, h / 2), this.level + 1));// topRight
this.areas.push(new QuadTree(new Rect(x, y, w / 2, h / 2), this.level + 1));// topLeft
this.areas.push(new QuadTree(new Rect(x, y + h / 2, w / 2, h / 2), this.level + 1));// bottomLeft
this.areas.push(new QuadTree(new Rect(x + w / 2, y + h / 2, w / 2, h / 2), this.level + 1));// bottomRight
}
show(ctx) {
// 繪製邊界
ctx.strokeStyle = "#FFF";
ctx.strokeRect(this.boundary.x, this.boundary.y, this.boundary.w, this.boundary.h);
// 顯示物體數/容量數,Debug
drawString(ctx, this.objs.length + "\n" + this.MAX_OBJ,
this.boundary.x + this.boundary.w / 2, this.boundary.y + this.boundary.h / 2,
"rgba(255,255,0,0.5)", 10, "consolas",
0, 0, 0);
// 往下繪製所有子領域區塊
if (this.areas.length != 0) {
for (let area of this.areas) {
area.show(ctx);
}
}
// 繪製出這塊領域的物體
for (let obj of this.objs) {
ctx.beginPath();
ctx.arc(obj.x, obj.y, 3, 0, Math.PI * 2);
ctx.stroke();
}
}
}
至於程式中CheckCollision(ObjectA, ObjectB),就是單純的點與矩形的碰撞檢測,請參考結尾附上的Code。
使用方法 :
// 建立QuadTree
var qt = new QuadTree(new Rect(0, 0, Width, Height));
// 新增物體
qt.insert(new Point(X, Y));
// 在Canvas中顯示分割與物體狀況
qt.show(Context);
如此一來就能建立基本可新增物體的QuadTree了。
基本插入範例,滑鼠點擊即可新增物體。新視窗執行 : Here
然後可以看到,每當一個區域插入4個物體後(MAX_OBJ = 4),就會將該領域往下分割4個子區域,最多分割5層(MAX_LEVEL = 5)。
5. 實作QuadTree–搜尋
搜詢的大致順序 :
- 如果搜尋範圍跟當前領域相交,檢查該領域有多少物體包含在搜尋範圍中,並增加至陣列中
- 當該領域有子區域時,繼續往下檢查有多少物件包含在搜尋範圍內
- 直到所有搜尋範圍內的區域都被檢測過,回傳所有在搜尋範圍內的物體
可以比對一下上面講的搜尋流程,應該會更清楚。
根據上述步驟,在QuadTree中加入query這個function :
query(range, found){
// 如果沒有給定回傳的陣列,就建立一個
if(!found) found = [];
// 判斷搜尋範圍(range)是否與當前領域有相交,沒有就直接跳掉,以節省效率
if (!CheckCollision(this.boundary, range)) return;
// 如果搜尋範圍跟當前領域相交,檢查該領域有多少物體包含在搜尋範圍中,並增加至found
for(let p of this.objs){
if (CheckCollision(p, range)){
found.push(p);
}
}
// 當該領域有子區域時,繼續往下檢查有多少物件包含在搜尋範圍內
if(this.areas.length != 0){
for(let area of this.areas){
area.query(range, found);
}
}
// 完成搜尋,回傳結果
return found;
}
而使用方法也非常簡單,給定一個搜尋區域,接著query就會直接撈出所有在搜尋範圍內的物體了 :
// 假設queryTree已經新增一些物體了
// 建立一個搜尋範圍
var checkRange = new Rect(20, 40, 150, 150);
// 套用搜尋範圍至queryTree取得範圍內的物體
var objects = queryTree.query(checkRange);
基本搜尋範例,滑鼠點擊新增物體,移動可取得範圍內的物體。新視窗執行 : Here
6. 實際應用
我將正常的碰撞檢測與QuadTree檢測放在一起做比較,可以清楚的看到,當物體數量到2000時,No QuadTree的檢測方法已經無法負荷,畫面有明顯卡頓。換成QuadTree檢測後,就只掉一點FPS,透過比對,可以明顯看到效能的提升。
每當物體碰撞時變成白色,滑鼠點擊新增100個物體,按下按鈕以切換不同檢測模式,觀察效能的差距 :
在新視窗執行 : Here
7. 總結
QuadTree或許不是最好的多物體檢測法,但多數狀況下還堪用,至於QuadTree優化的部分,可以參考這篇文章,講得非常清楚。
這邊預計要再補上QuadTree跟其他檢測法的優缺點,但目前只研究QuadTree,所以無從比較,日後補上。
文章中所有的Source Code都在Github中 : https://github.com/md9830415/JS-QuadTree
大概就是這樣了,下期再見,掰掰。